

【Konnex】RoboFi platform enabling autonomous execution of robotic physical tasks—from contracting and verification to settlement—via smart contracts / @konnex_world
Use cases for realizing RoboFi have emerged

Good morning.
I’m Mitsui, a web3 researcher.
Today I researched “Konnex”.
What is Konnex?
Platform Structure
Assumed Use Cases
Transition and Outlook
Use cases for realizing RoboFi have emerged
TL;DR
Konnex is a RoboFi platform that enables autonomous execution of physical tasks performed by robots—from contracting and verification to settlement—via smart contracts.
Using the Universal Task Language (UTL) and Proof of Physical Work (PoPW), different robots and AI can reliably collaborate without human intervention.
A design that separates practical settlements using stablecoins from verification and governance using KNX tokens, aiming to scale real-world labor.
What is Konnex?
“Konnex” is,A platform integrating robotic physical labor with blockchain technologyIt is designed so that robots can digitally sign on-chain smart contracts to enter into work agreements, autonomously handling everything from task ordering and receiving to result verification and settlement.
Below is an overview of the architecture.
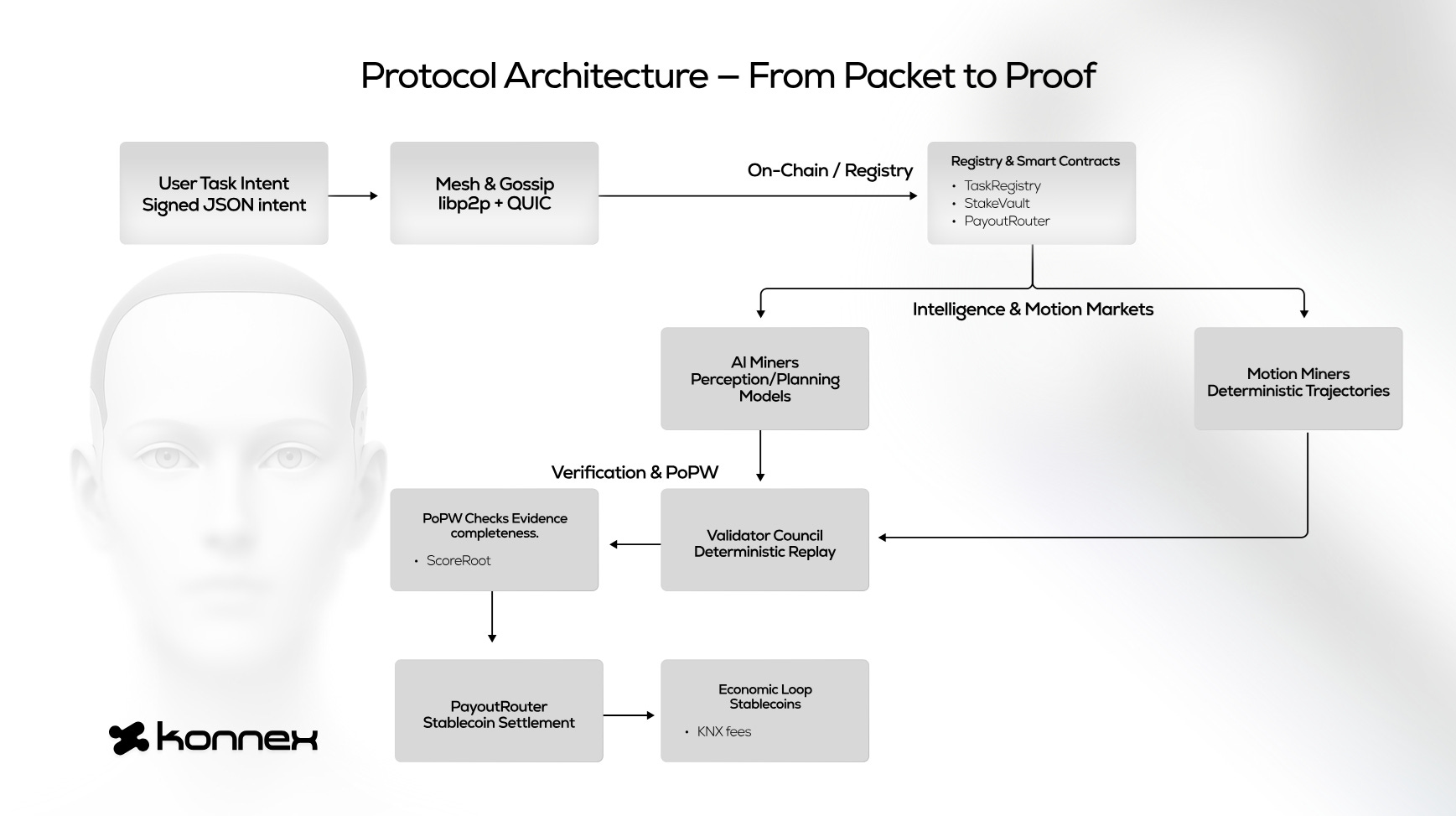
I’ll explain it simply.
First, robot-to-robot communication occurs over a low-latency P2P mesh network (QUIC/libp2p), with each task request described in JSON format using the “Universal Task Language (UTL)”.
UTL enables the description of common tasks independent of manufacturer-specific specifications, allowing robots and AI models to understand and coordinate uniformly. This standardization of task grammar eliminates vendor lock-in, enabling different robots and AI systems to exchange instructions and information using the same language.
On the blockchain, a mechanism called Proof-of-Physical-Work (PoPW) is used to verify the completion of physical labor.
Each task contract records the work details, deadline, and reward amount, along with the stablecoin deposit pledged as collateral by both the requesting party and the worker. During task execution, the robot (worker) records sensor data and video logs, then uploads a PoPW bundle (containing sensor records, short video clips, etc.) upon completion.
Network validators review the proof data and verify that the work was performed according to the conditions specified in the smart contract.
For example, delivery tasks require evidence such as “GPS travel route + photo of the delivery completion site,” cooking tasks require “temperature log + image inside the frying pan,” and inspection tasks require “high-resolution images of the inspected area,” depending on the task type. If task completion is recognized by a majority vote of validators, it receives PoPW approval and is recorded on the blockchain as reliable proof of execution.
This enables the verification of robot performance without human supervision, allowing for automated settlement based on results.
Konnex’s communication layer, contract layer, and verification layer work together as described above, forming a technical framework that enables robots to complete the entire process—”job agreement → execution → proof of completion → payment”—without human intervention.
All settlements are conducted in stablecoins with minimal price fluctuations, and transaction fees, penalties, and deposit refunds are handled at stable values.
On the other hand, it employs a two-layer structure where the platform’s native token, “KNX” (Konex), is used for network fees and governance voting.
KNX serves as security collateral, fee payment, and future governance voting rights, while PoPW validators stake KNX to demonstrate network integrity.
In this way, Konnex combines robotic control and sensor technology with blockchain’s trust foundation to realize an innovative architecture that makes the fulfillment of physical work agreements programmable and verifiable.
Platform Structure
The above described an architecture where robots autonomously perform tasks. However, Konnex also functions as a marketplace for robots to match task requests with available robots.
Demand-side users (task requesters) post jobs (tasks) on the platform, while supply-side users (robot owners or the robots themselves) bid on and accept these tasks.
What’s even more distinctive is that it creates a three-party marketplace where not only robots and clients are matched, but AI developers also participate.
For example, when a task (e.g., making soup) is posted, multiple AI developers (policy providers = “AI miners”) compete in the backend by proposing their own control algorithms and AI models.
These proposed policies are first validated in a simulation environment, and the one evaluated as having the best performance is deployed to the robot and executed.
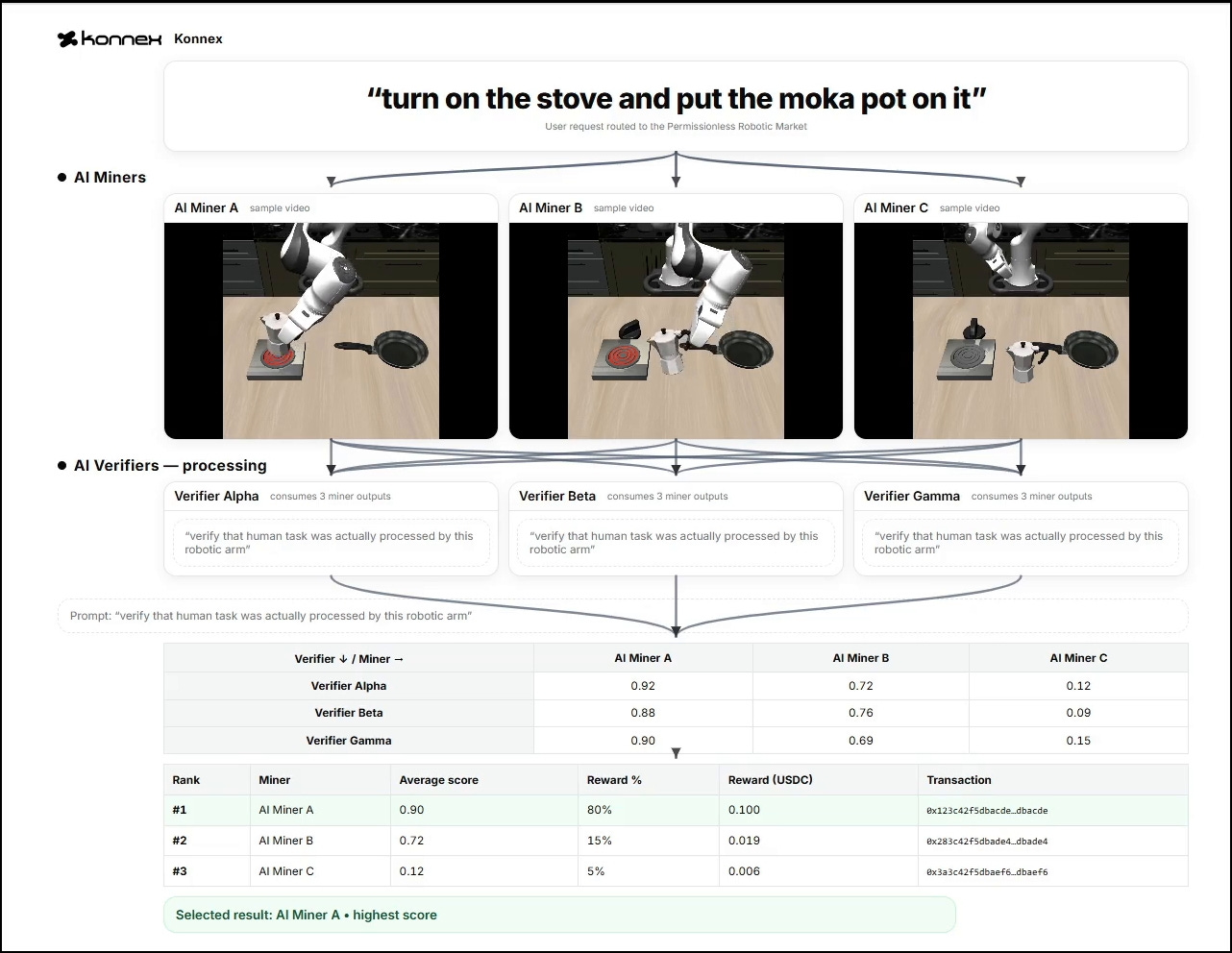
In this way, Konnex incorporates a mechanism where both the robot owner (provider of physical labor) and the AI algorithm provider (provider of intelligence) participate, enabling the selection of AI control systems that can optimally execute requested tasks through market principles.
AI developers earn rewards by having their algorithms applied to tasks, while robots gain access to optimal intelligence on demand—creating a two-way incentive system.
Through this integrated structure combining the intelligence market and physical labor market, Konnex aims to create a new economic ecosystem that unifies the licensing of robot intelligence with labor contracting.
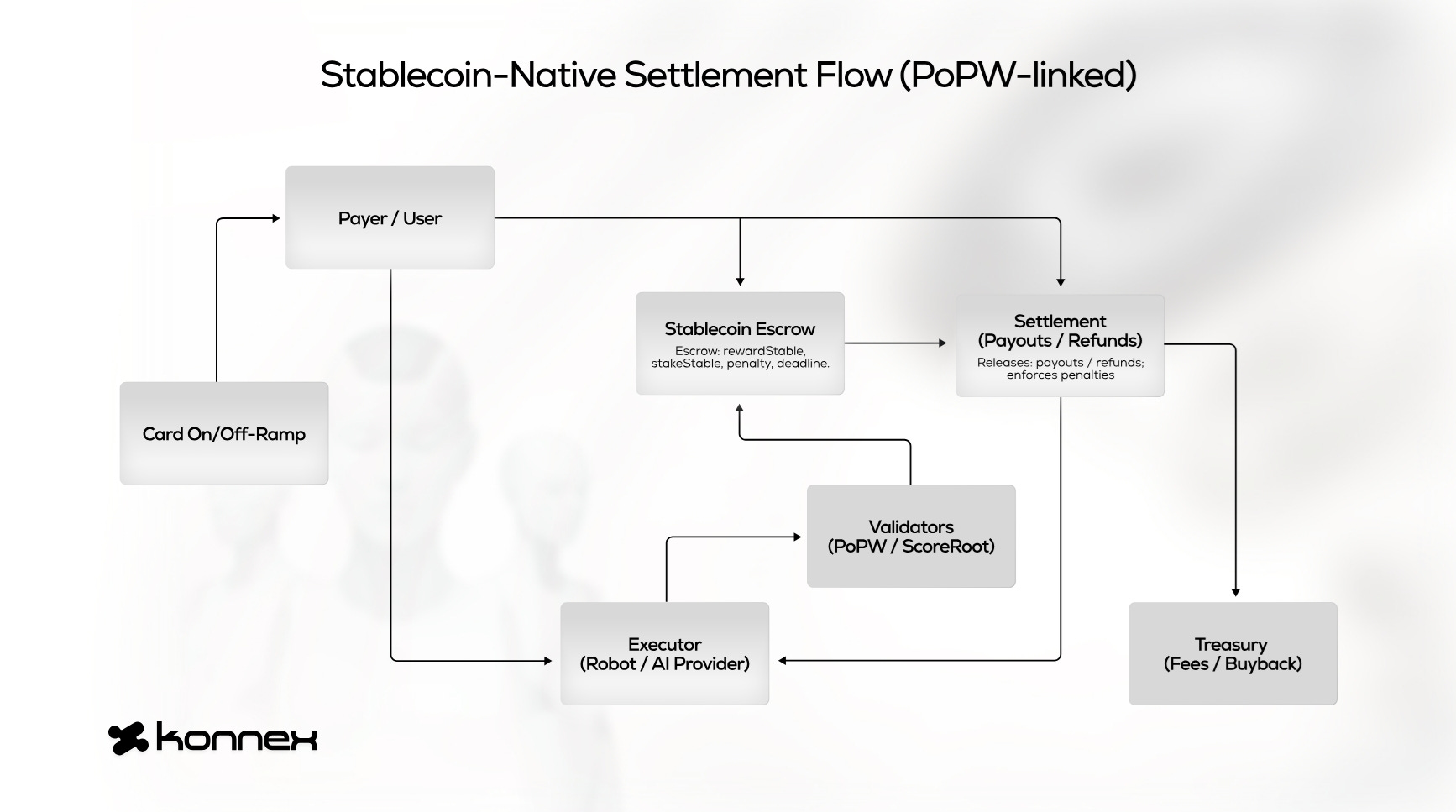
◼️Transaction Flow
The transaction flow on the platform is as follows and is managed by smart contracts.
① Offer
The task requester specifies the job details, deadline, and reward amount (denominated in stablecoin) and publishes the job. At this point, the requester also deposits a contract guarantee (a small deposit in stablecoin, separate from the reward amount, is locked).
② Bid
Robots capable of performing that job will bid. Each will present their ETA (Estimated Time of Arrival/Completion), their current location, and the proposed guarantee amount. The required guarantee amount varies based on the robot’s reliability (past performance), meaning robots with a strong track record can bid with less collateral.
③ Matching
When the requester selects one bid from the submissions, the match is confirmed. The requester’s reward amount and the robot’s security deposit are escrowed (locked) on the smart contract. A small network fee (in KNX) is incurred at this time.
④Execute
The robot executes the specified task. During execution, it continuously records sensor data and action logs in a compact snapshot format. For example, it records position and images at regular intervals or takes photos upon task completion, accumulating data necessary for the proof described later.
⑤ Proof
After task completion, the robot (or backend system) uploads the Proof-of-Work bundle to the blockchain. This bundle is linked to the job ID (a unique hash ID assigned to each task) and contains the corresponding sensor log records, short video clips, images, and other data.
Third-party validators examine this evidence off-chain and evaluate whether it meets the specified achievement criteria. Based on the scores and consensus of multiple verifiers, the final Proof of Work determination (approved or rejected) is made.
⑥Settle
Once the verification confirms the task is complete, the smart contract immediately settles the transaction. The escrowed reward amount in stablecoins is paid to the robot owner, and both parties’ security deposits are released and returned.
Conversely, if a failure is determined due to missed deadlines or insufficient evidence, the robot’s security deposit is forfeited and refunded or compensated to the client. Furthermore, this failure record is publicly disclosed on-chain and reflected in the robot’s credit score.
Konnex validators themselves stake KNX tokens and stablecoins as collateral to prevent erroneous validations (such as mistakenly approving failed tasks). Should they perform fraudulent approvals, they lose their stake.
As described above, in Konnex,Smart ContractIt automatically executes the entire workflow from job recruitment to payment and penalty fee settlement.
The primary roles of smart contracts include performing identity verification and credit score management through the “RobotIdentity” contract linked to the robot’s public key, and recording escrow funds, deadlines, and penalty conditions for each task via the “TaskRegistry” contract.
Additionally, modules are available to manage validator dual staking (KNX and stablecoins) via “StakeVault” and to perform instant payment processing based on validation results via “PayoutRouter”.
These contracts are expected to operate on Ethereum-compatible blockchains, where job progress and verification scores (ScoreRoot) are recorded per block, forming an immutable and transparent history.
Assumed Use Cases
Konnex envisions a wide range of use cases, encompassing all types of real-world physical labor across logistics, manufacturing, agriculture, infrastructure inspection, and the service industry.

The platform’s vision is to “scale physical labor with the same fluidity as software,” aiming to replace and streamline various manual field operations traditionally reliant on human labor through autonomous robots and blockchain technology.
Below are specific use case examples presented by Konnex.
◼️Logistics & Distribution
A world where drones and autonomous robots deliver packages and food.
For example, we envision a workflow where multiple drones and ground robots collaborate to divide delivery tasks within an area. Each robot submits GPS route logs and delivery completion photos as proof-of-work evidence. Upon verification, rewards are paid out immediately.
◼️Agriculture and Environmental Monitoring
Automation in farmland is another key use case. We envision a future where agricultural technologies—such as seeding robots, crop growth monitoring drones, and harvesting robots—collaborate based on shared data.
For example, a system where robots patrolling fields collect data using soil sensors and cameras, and then pay AI model providers based on the accuracy and usefulness of that data (success-based compensation tied to the model’s prediction accuracy).
Furthermore, by enabling mutual data verification among agricultural machinery, the goal is to realize “responsive agriculture” that reduces waste and excess. The roadmap also schedules agricultural trials for Phase 2, with demonstration experiments expected in crop management and automated harvesting.
◼️Manufacturing・Warehouse
Warehouse inventory management drones and factory line transport robots are also targets.
For example, a division of labor could involve drones scanning and recording inventory data during warehouse stocktaking, with cloud-based AI detecting discrepancies and then instructing autonomous forklifts to perform replenishment tasks. The roadmap explicitly mentions warehouse pilots, with plans to test the Konnex system in logistics centers and similar facilities.
◼️Infrastructure Inspection and Security
Infrastructure inspections using drones and crawler robots are also included in the use cases. For example, a city authority could commission Konnex to conduct a corrosion survey on a bridge, where multiple inspection robots collect sensor data and submit the results as a PoPW report with high-resolution images.
The verifier evaluates them collectively, and once it is confirmed that problematic areas have been comprehensively detected, payment is made. This approach can also be applied to robot utilization in labor-shortage areas such as public infrastructure monitoring and security patrols.
◼️Service Industry (Food Service, Cooking, Nursing Care, etc.)
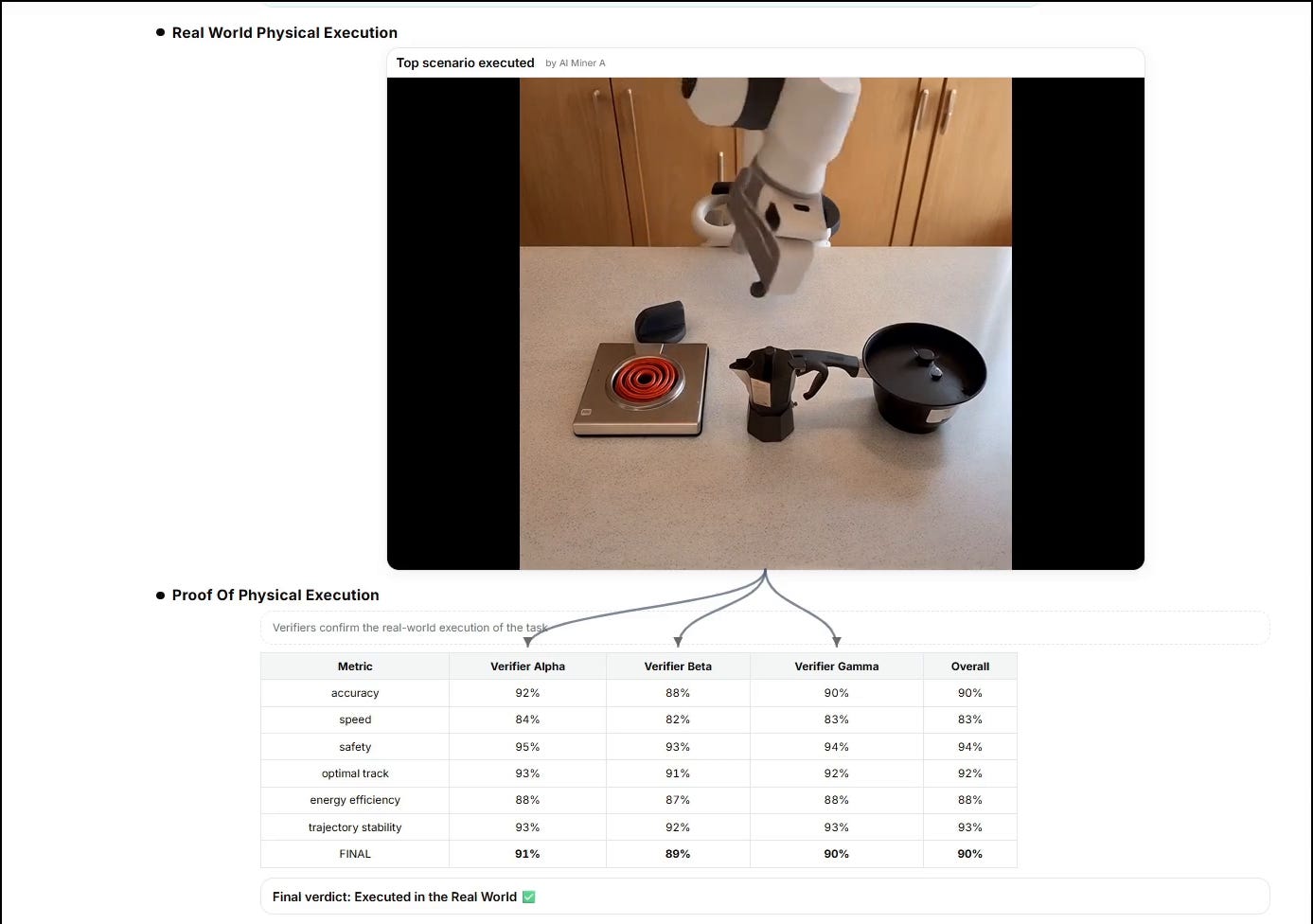
Applications for service robots in homes and restaurants are also being considered. The official website presents a scenario for a “Robot Kitchen” where a robotic arm prepares meals while continuously monitoring pot temperatures and arm torque data. If the cooking is done correctly, payment is automatically processed.
In Konnex’s future vision, when a user commands “Make two servings of ○○,” the robot downloads the appropriate cooking AI model from the Konnex marketplace (paying usage fees to the AI provider in stablecoins). After cooking execution, the process completes with PoPW verification clearance, reward payment, and distribution of recipe copyright royalties.
In this way, future applications are anticipated in lifestyle and service sectors, such as automated restaurant kitchens, cooking assistance robots for general households, and even motion log verification for care support robots (e.g., recording evidence of correct medication administration).
◼️Summary
As described above, the use cases Konnex envisions are extremely broad. The company states it is “targeting the entire real-world labor economy (approximately $25 trillion in scale),” with applications envisioned across all sectors: manufacturing and logistics in the industrial domain, infrastructure and agriculture in the social domain, and households and food service in the service domain.
However, not all of these are currently realized; we are first at the stage of advancing technical verification through demonstration experiments and pilot projects.
Transition and Outlook
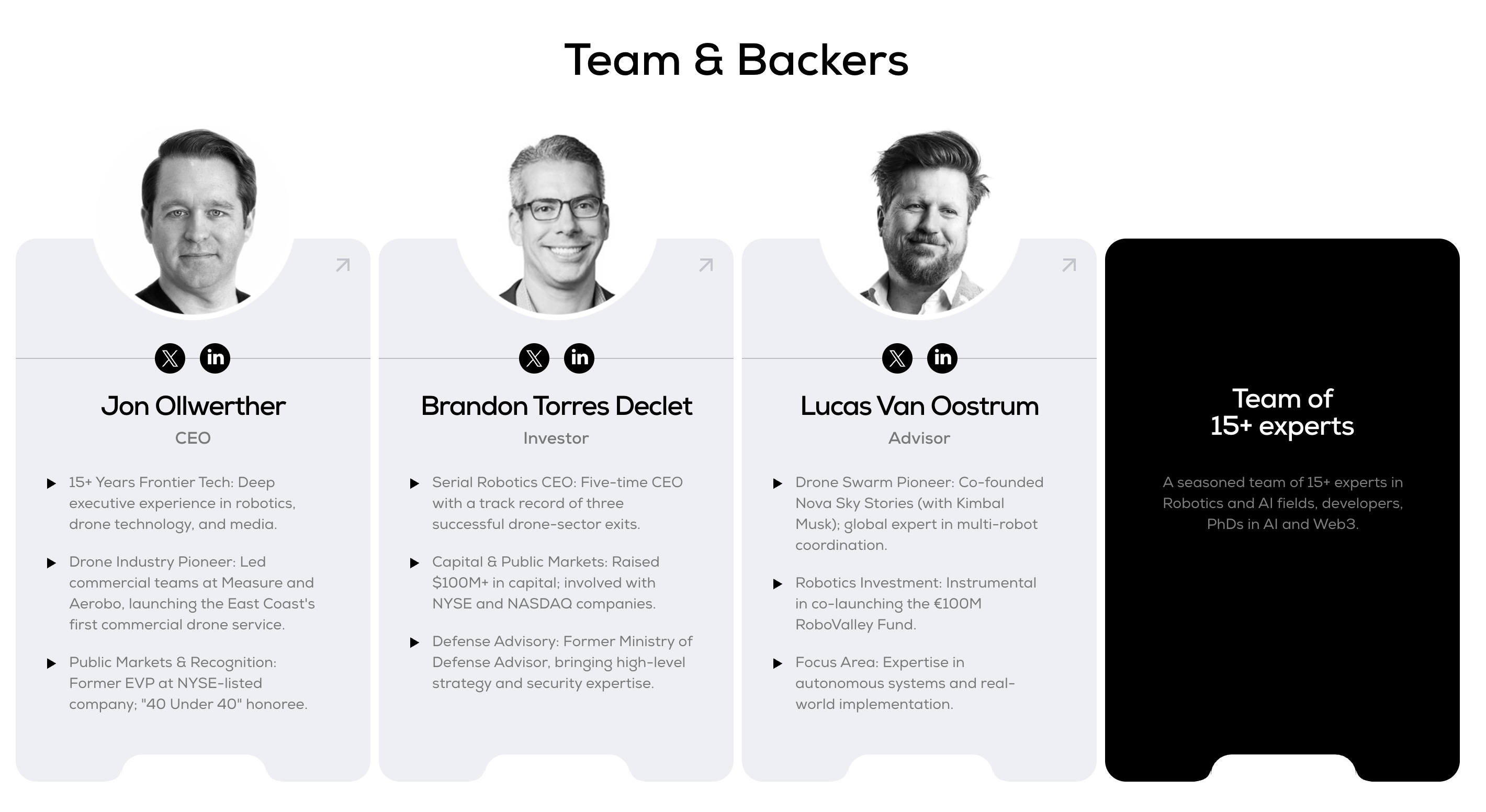
Konnex is a startup founded in 2025, composed of members who are experts in both robotics and blockchain.
Jon Ollwerther serves as CEO. He is an entrepreneur and executive with over 15 years of experience in frontier technology fields, possessing expertise in both the media industry and robotics.
Brandon Torres Declet serves as Strategic Supporter for the team. He is a serial entrepreneur with five CEO tenures and an expert in drone robotics and defense. He has deep connections with the U.S. Department of Defense and government agencies, having served as CEO of Measure (which grew to become North America’s largest drone service provider) and CEO of NYSE-listed AgEagle Aerial Systems.
Lucas Van Oostrum is listed as a Strategic Advisor. Originally from the Netherlands, he is a pioneer in drone swarms and a world expert in the cooperative control of multiple robots. He co-founded the drone show company Nova Sky Stories with Kimbal Musk, the brother of Elon Musk, and also contributed to the launch of RoboValley, a European robotics innovation hub.
Additionally, in mid-January 2026, we announced our first external funding round and successfully raised $15 million.

This round is positioned as a strategic investment, with investors including Cogitent Ventures, Liquid Capital, Leland Ventures, Covey Network, M77 Ventures, and Block Maven LLC—VCs and investor groups active in the crypto and emerging tech sectors.
◼️Roadmap
Konnex has a clear roadmap, with development milestones from 2025 and beyond divided into four phases. The goals and planned rollouts for each phase are as follows:
Phase 0: Testnet Sprint (0–6 months)
Primary Purpose
Prove that Konnex actually works technically
Verify the entire process from robots performing work, providing proof, to receiving payment in USD.
Things to do
Task → Bidding → Execution → PoPW Verification → USD Settlement,End-to-end verification
Providing robot simulators (KitchenSim / RackSim)
PoPW (Proof of Physical Work) Prototype and Verification Logic Development
Implementation of Escrow/Reward/Penalty Processing Using Stablecoins
Dual Staking Design(KNX + Stablecoin) Design
Validator Slash Rule Definition
SDK v0.9 provides (CLI, Python, API)
Launch of the Initial AI Miner (Developer) Community
Success rate, verification time, etc.Acquisition of Basic KPIs
Phase 1: Mainnet MVP (6–12 months)
Primary Purpose
Launch the minimum viable mainnet that can be used safely
Developers and robots bring it to a “truly usable” state
Things to do
Finalization of Task Schema v1.0 (Specification Freeze)
Major Smart ContractsExternal Security Audit
Launch of the Validator Council
PoPW Validation Network with Dual Staking Now Operational
Using stablecoins (such as USDC)Production Settlement Commencement
Implementation of a mechanism to allocate a portion of fees to the KNX buyback/treasury
Miner Bootcamp(Education for AI Miners and Open-Source Software Release)
Initial pilot operation using the first actual robot
Credit Card → Stablecoin On-Ramp Beta Service
Verification Accuracy SLA (False Positive Rate < 1%) Configuration
Phase 2: Industrial Pilot (12–24 months)
Primary Purpose
Prove that it is “economically meaningful” in the real economy.
Raise it to a level usable by companies and research institutions
Things to do
Field Trials in Warehousing and Agriculture (Logistics, Inventory, and Agricultural Machinery Integration)
Cooperative Experiment Using a Fleet of University Robots (Rovers)
PoPW-compatible Sensor Expansion (IMU, LiDAR, etc.)
Support for large-capacity evidence data (IPFS / S3 anchors)
BondMatrix v1(A system enabling third parties to provide security deposits to robots)
Swarm Control Compatible
Joint bidding by multiple robots
Fee Split
KYC/AML On/Off Toggle (Corporate/Government Compliance)
Cross-chain compatibility (support for stablecoins on other L1/L2 networks)
Developer Grant Distribution (Partial Treasury Rebate)
Reduced Security Deposits Through Trust Score Improvement (Cost Optimization)
Phase 3: Global Motion Leisure (24–48 months)
Primary Purpose
Becoming a global “robot labor infrastructure”
Achieve a self-sustaining decentralized economy that functions without central management
Things to do
PoPW / PoPE v3 (Sensor-Independent, Generic Proof Framework)
Reuse of Robot Motion and Trajectory Data and Royalty Design
Secondary Market Formation for AI Models/Motion Plugins
Support for large-scale payments using fiat currency (credit cards, invoices)
Enterprise Stablecoin Billing and Accounting Solutions
Using KNXFull-scale governance commences
commission rate
Stake Requirements
Protocol Update
Regional Stablecoin Guarantee Pool (Regulatory Compliance)
Full Transition to Community-Led Management
As described above, Konnex is currently in its growth phase immediately following the mainnet launch, with protocol refinement and expansion of real-world application scope being advanced simultaneously.
Use cases for realizing RoboFi have emerged
Finally, we conclude with a summary and analysis.
Since last year, trends in physical AI and robotics have gradually emerged beyond the crypto space. Alongside this, a new category called RoboFi—combining robotics and blockchain—has emerged within the crypto domain.
Konnex, which we researched this time, is also part of the RoboFi domain. Considering the founders’ track record, it appears to be a project with considerable promise.
However, as evident from Konnex’s roadmap, they are pursuing steady progress step by step. Therefore, I believe it will take several years before we see the kind of autonomous negotiation, contracting, task execution, payment, and review between robots and AI systems that many imagine.
Nevertheless, I believe blockchain will form the foundation in the world emphasized by the inevitable rise of robotics. This is because decentralized implementation is often far more efficient—not just for payments, but also for robot IDs, ownership management and reputation, and verification of task execution.
Personally, I believe that among the things blockchain has validated over the past decade are the mechanisms and philosophy of decentralized validation by validators. The system where tokens are staked to enable decentralized validation and earn rewards is applicable to virtually anything, and it is also being utilized for Konnex’s task validation.
Therefore, I intend to patiently wait while continuing to research a world where blockchain is implemented as social infrastructure.
That concludes our research on “Konnex”!
Reference Links:HP / DOC / X
Disclaimer:I carefully examine and write the information that I research, but since it is personally operated and there are many parts with English sources, there may be some paraphrasing or incorrect information. Please understand. Also, there may be introductions of Dapps, NFTs, and tokens in the articles, but there is absolutely no solicitation purpose. Please purchase and use them at your own risk.
About us
🇯🇵🇺🇸🇰🇷🇨🇳🇪🇸 The English version of the web3 newsletter, which is available in 5 languages. Based on the concept of ``Learn more about web3 in 5 minutes a day,'' we deliver research articles five times a week, including explanations of popular web3 trends, project explanations, and introductions to the latest news.
Author
mitsui
A web3 researcher. Operating the newsletter "web3 Research" delivered in five languages around the world.
Contact
The author is a web3 researcher based in Japan. If you have a project that is interested in expanding to Japan, please contact the following:
Telegram:@mitsui0x
*Please note that this newsletter translates articles that are originally in Japanese. There may be translation mistakes such as mistranslations or paraphrasing, so please understand in advance.